

Lors du concours robotique de la Darpa en 2015, le public ébahi avait découvert la grande maladresse des humanoïdes qui tombaient presque tous au cours des différentes étapes. Marcher relève en effet de la prouesse pour une machine bipède. Il est difficile de doser l’effort pour garder l’équilibre, d’où cette démarche saccadée de la plupart des robots. Des chercheurs de l’Ecole polytechnique de Lausanne s’attellent à rendre cette action plus naturelle.
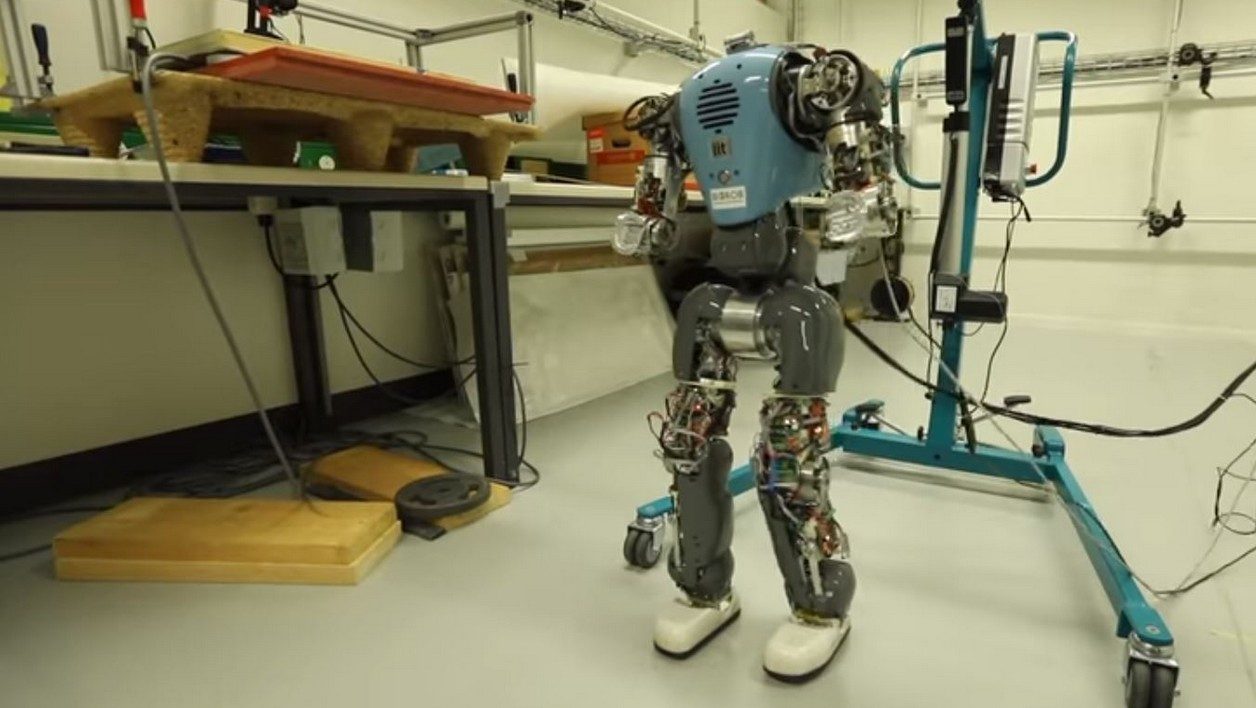
Pour cela, ils ont mis sur pied une plateforme et un robot humanoïde sans tête répondant tous les deux au nom de COMAN pour Compliant Humanoid Robot. Haut de 95 centimètres, il est doté d’articulations particulières. « Elles intègrent des élastiques qui absorbent les chocs », explique dans une vidéo de l’Ecole polytechnique de Lausanne le chercheur au laboratoire de biorobotique Hamed Razavi. Ces dernières donnent également davantage de flexibilité aux mouvements.
Un nouveau type d’algorithmes pour contrôler les articulations
Autre innovation, les algorithmes qui contrôlent la marche. Ils analysent en temps réel toutes les données du robot, comme sa vitesse ou sa position dans l’espace, et transmettent ces informations aux articulations. Ce qui permet de calibrer exactement l’inflexion nécessaire. « Si l’humanoïde est poussé, l’algorithme calcule où, exactement, le pied doit être posé et la force à mobiliser pour annuler la perturbation », décrit encore Hamed Razavi. Comme si le robot avait conscience de son corps.
Pour le moment, COMAN ne fonctionne que sur une surface lisse. L’équipe de recherche veut affiner les algorithmes pour enrichir ses mouvements afin d’affronter des terrains accidentés et de surmonter des obstacles. Avec, à la clef, des applications dans le domaine des robots d’assistance dans des zones sinistrées ou dans celui des exosquelettes afin de porter des charges ou d’aider des handicapés à marcher.
🔴 Pour ne manquer aucune actualité de 01net, suivez-nous sur Google Actualités et WhatsApp.








