

Un robot assez intelligent pour apprendre tout seul à manipuler des objets. C’est ce que viennent de mettre au point des chercheurs du Massachusetts Institute of Technology (MIT). Ce bras articulé peut en effet manœuvrer toutes sortes de choses, sans qu’un humain n’ait à lui dire comment procéder.
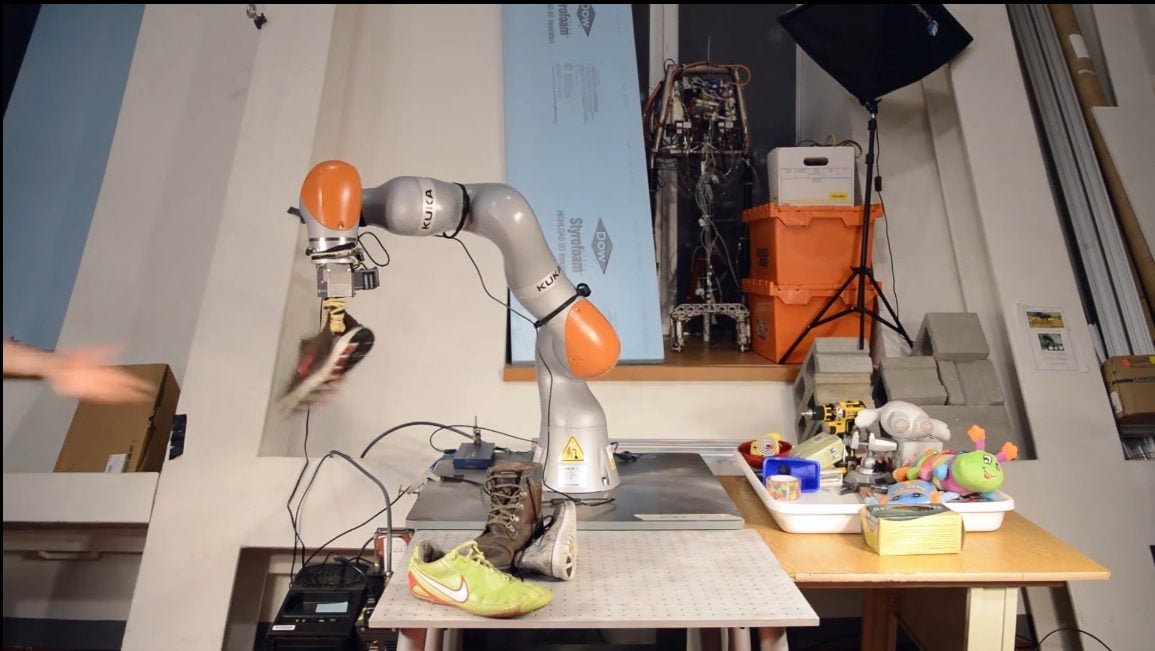
L’exemple donné par Wired est on ne peut plus clair. Le challenge pour le robot est ici de saisir toujours la même chaussure par sa languette. Facile a priori, sauf quand on la déplace à chaque essai et qu’on la noie parmi d’autres chaussures. Pourtant le bras automatisé du MIT y parvient sans aucun problème.
Pas besoin d’entraînement spécifique
Cela est étonnant au premier abord, car dans ce genre de cas, l’apprentissage entre deux situations différentes est généralement fastidieux. Il faut pour cela entraîner l’intelligence artificielle qui guide le robot. Cette dernière apprend normalement grâce à un apprentissage par imitation lors duquel elle reproduit ce qu’elle voit, en l’occurrence les mouvements d’un autre bras manipulé par un humain.
L’autre technique d’apprentissage est celle de la récompense. Dans notre cas précis, le robot tente de saisir la chaussure un peu au hasard et il est récompensé dès qu’il s’approche au plus près. Au fur et à mesure, ses tentatives s’affinent pour parvenir enfin à attraper le bon objet.
Sauf que cette fois-ci, le bras articulé du MIT n’agit pas du tout de cette manière. Son secret réside dans les caméras qui l’équipent et qui peuvent complètement recréer la scène visée en 3D. Le tas de chaussures devant lui est analysé sous tous les angles et reproduit dans ce mode visuel où il est représenté grâce à un système de coordonnées. Quelles que soient les chaussures que l’on place devant lui, le robot arrivera donc à les identifier et à retirer la bonne de cet amas de souliers.
Une question de force et de forme
Le système promet donc un avantage certain pour ce qui concerne l’évolution des robots dans un environnement humain. En reconnaissant les objets qu’il est censé manipuler, un tel bras pourrait à la fois se servir d’une tasse ou d’un couvert en inox ; deux objets qu’on ne saisit pas avec la même force, au risque de briser le premier.
On manipule également différemment les objets en fonction de leur forme. En cela, les recherches du MIT pourront être combinées à celles menées par l’université de Californie à Berkeley. Ce programme baptisé Dex-Net calcule le meilleur endroit par lequel saisir un objet. Parfait pour mettre un point un robot domestique qui doit ranger la vaisselle dans le placard. Sans la casser.
🔴 Pour ne manquer aucune actualité de 01net, suivez-nous sur Google Actualités et WhatsApp.








