

Un enfant tombe à maintes reprises avant de trouver l’équilibre pour arriver à marcher. Question d’expérience. Des chercheurs de l’Université Carnegie Mellon ont adopté la même méthode pour améliorer les systèmes de navigation des drones. IEE Spectrum rapporte qu’ils ont choisi l’engin grand public AR Drone de Parrot et l’ont confronté à 20 environnements intérieurs différents, cumulant 11 500 collisions au bout de 40 heures de vol ! Chaque mission a été filmée pour constituer une solide base de données alimentant un réseau de neurones profond qui a appris à éviter les obstacles. Au final, cela a permis de développer un système de navigation 2 à 10 fois plus performant qu’une caméra avec capteur de profondeur se contentant d’estimer une distance.
Dans la vidéo ci-dessous, on voit défiler les différents crashs, puis les vues embarquées du drone et enfin le résultat final lorsque le drone parvient à contourner un objet en mouvement :
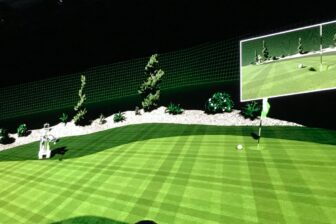
Le système fonctionne même avec des murs blancs ou des surfaces vitrées
Chaque collision était aléatoire : le drone déviait lentement jusqu’à rentrer dans un objet : canapé, mur, bureau. Après, il revenait à son point de départ et choisissait une nouvelle direction quand il était encore en état de fonctionner. A chaque sortie, le drone a enregistré des vidéos. Les images ont ensuite été réparties en deux séries : d’un côté celles où la trajectoire était fluide, de l’autre celles qui ont abouti à une collision. L’algorithme de navigation du drone repose maintenant sur ces deux types d’images. Il change d’orientation lorsqu’il reconnaît la situation qui a provoqué sa chute, ou continue d’avancer.
L’article des chercheurs précise bien que leur système n’atteint pas encore le niveau de fiabilité d’un homme aux commandes. Mais il s’est montré particulièrement performant avec des murs blancs ou des surfaces vitrées, d’ordinaire mal repérées par des capteurs.
Si l’expérience paraît difficilement reproduisible avec des drones de la taille d’un avion, elle a le mérite d’avoir été l’occasion de constituer la plus grosse base de données à ce jour de crashs de drones de loisir. Et montre qu’il peut-être pertinent d’utiliser des données négatives pour développer des méthodes d’apprentissage automatique.
🔴 Pour ne manquer aucune actualité de 01net, suivez-nous sur Google Actualités et WhatsApp.